Blocco di acquisizione analogico
Lo schema del blocco di
acquisizione analogico č composto da
tre sezioni distinte. Le descrivo brevemente, in seguito dovrň organizzare
tutto in modo piů ordinato e appronfondito.
1. CPLD e memoria.
Questa č la sezione che si occupa della memorizzazione dei dati. Segue una
descrizione dei segnali della CPLD e del loro utilizzo:
- CD0...CD7 (I/O): bus
dati esterno, comune a tutti i moduli di acquisizione e al modulo
principale.
- CA0...CA1 (I): segnali
di indirizzamento esterni. Per selezionare la CPLD č necessario che sia CA0
che CA1 siano posti a "1". Questa scelta č stata fatta per
ridurre al minimo i pin della CPLD utilizzati e per rendere semplice
l'impostazione dell'indirizzo di ciascun modulo (bastano un paio di
ponticelli). Ovviamente il numero dei dispositivi indirizzabili si riduce
considerevolmente rispetto all'utilizzo di una decodifica degli indirizzi
"canonica"; considerando ad esempio otto bit, anziché 256 moduli
se ne possono indirizzare 28, che comunque č giŕ un buon numero.
In compenso questo metodo permette di indirizzare contemporaneamente piů
moduli, rendendo ad esempio possibile la configurazione simultanea con una
singola scrittura.
- RD (I): segnale di
controllo per leggere il dato memorizzato nella SRAM nella posizione attuale
(a ogni lettura l'indirizzo viene incrementato). Questa funzione deve essere
utilizzata soltanto quando l'acquisizione non č in corso
(GO="0"). Conoscendo la dimensione della SRAM e il numero di
campioni di pre- e post-trigger, č possibile posizionarsi nel punto
desiderato della SRAM.
- WR0 (I): segnale di
controllo per scrivere il valore di otto bit che sarŕ confrontato con i
valori campionati dall'ADC per verificare la condizione di trigger.
- WR1 (I): segnale di
controllo per scrivere la "configuration word" di tre bit. Il bit
0 seleziona il fronte sul quale eseguire il trigger ("0"=salita
"1"=discesa); il bit 1 č l'enable del trigger
("0"=disabilitato "1"=abilitato; ovviamente soltanto un
modulo deve avere il trigger abilitato); il bit 2 č il bit di
"sblocco" di GO (una volta che una CPLD pone GO="0",
esso non sarŕ piů rilasciato finché non verrŕ scritto un "1"
in questo bit).
- WR2 (I): segnale di
controllo per scrivere la "control word" di quattro bit. I primi
tre selezionano il guadagno di ingresso; l'ultimo bit abilita o meno il
disaccoppiamento dell'ingresso ("0"=DC "1"=AC).
- CLOCK (I): il clock
che piloterŕ l'ADC. Esso deve essere giŕ stato impostato alla frequenza
desiderata da qualche dispositivo a monte; la CPLD si limita a passarlo
inalterato all'ADC e alla SRAM.
- GO (I/O, open drain):
il segnale di sincronizzazione fra i vari moduli. Quando GO="0"
significa che un modulo ha richiesto un'interruzione del campionamento
(condizione di trigger per i moduli di acquisizione, o scadenza del timeout
per il modulo principale).
- MEMRD (O): segnale di
pilotaggio per la lettura della SRAM. Viene generato in base a CA0, CA1 e
RD.
- DATA0...DATA7 (I): bus
dati interno del blocco di acquisizione; collega ADC, SRAM e CPLD. La CPLD
si limita a "guardare" i dati mentre passano per verificare la
condizione di trigger e pilotare opportunamente i segnali di clock e di
enable.
- ADDR0...ADDR15 (O): il
bus indirizzi interno del blocco di acquisizione. Serve per indirizzare in
modo opportuno la SRAM.
- CLKOUT (O): pilota l'ADC.
Attivo soltanto quando GO="1".
- CLKOUT
(O): pilota la SRAM. La fase č invertita rispetto a CLKOUT per permettere
di far stabilizzare il dato in uscita all'ADC, per poi memorizzarlo.
- CTLOUT0...CTLOUT3 (O):
sono i bit della "control word" direttamente riproposti
all'esterno.
- TDI, TDO, TMS, TCK:
questi segnali servono per l'interfacciamento al bus JTAG (IEEE-1149.1),
necessario per la programmazione della CPLD. Ogni modulo disporrŕ di uno
zoccolo al quale si potrŕ collegare l'appropriato programmatore.
2. Stadio di ingresso.
Il frontend analogico č abbastanza "canonico". L'ingresso č adattato
per una normale sonda 10:1 (10 Mohm, compensatore 10-15 pF); dopodiché ci sono
i blocchi per eliminare le componenti in continua nel caso che sia selezionata
la modalitŕ AC. A questo punto potrebbe seguire un classico amplificatore da strumentazione con ingresso
differenziale e guadagno unitario: non tutti gli oscilloscopi dispongono di
ingressi differenziali, ma questa funzione si puň rivelare utile in parecchie
situazioni. Negli schemi ho riportato sia lo stadio di ingresso in versione
differenziale che in versione single-ended, anche se credo che nel primo
prototipo opterň per quest'ultima soluzione. In ogni caso il resto del capitolo
č riferito alla versione differenziale.
L'uscita (single ended)
dell'amplificatore da strumentazione viene amplificata/attenuata da un
operazionale in configurazione invertente; il guadagno č determinato dalla
resistenza che c'č fra i punti RGAINN e RGAINP, impostata dallo stadio di
commutazione del guadagno. Originariamente avevo tentato di impostare il
guadagno agendo direttamente sull'amplificatore di strumentazione, secondo
questo noto schema (immagine presa da Sedra-Smith, "Microelectronic
Circuits" quarta edizione, pag. 90):

Il guadagno č dato dalla
formula:
Adiff=(1+2R2/R1)*(R4/R3)
Come si vede si puň
impostare il guadagno agendo su una singola resistenza, R1. Tale
resistenza č anche quella che determina la corrente che scorre su tutto il ramo
R2-R1-R2; il suo modulo vale (v1-v2)/R1.
Sfortunatamente gli switch utilizzati per commutare le resistenze per il
guadagno sono caratterizzati da una certa capacitŕ parassita verso massa;
immaginate cosa succederebbe se i capi di R1 fossero collegati a
massa tramite due condensatori: se R1 fosse molto alta, una corrente
non trascurabile se ne andrebbe attraverso tali capacitŕ. Quindi la corrente
sulle R2 aumenterebbe, e con essa il guadagno. Questo fenomeno si
puň verificare in modo molto chiaro con PSPICE: facendo un'analisi AC si
evidenzia un picco alle alte frequenze.
Non mi viene in mente
nessun metodo efficace per compensare questo fenomeno in modo
"semplice", direttamente su ogni ramo della rete di commutazione del
guadagno e senza mettere dei condensatore in serie ad altri componenti (e quindi
tagliare le componenti DC, cosa che non vogliamo fare). Utilizzando invece un
amplificatore invertente, e ponendo la rete di commutazione al posto della
resistenza di retroazione, ci troviamo in questa situazione:
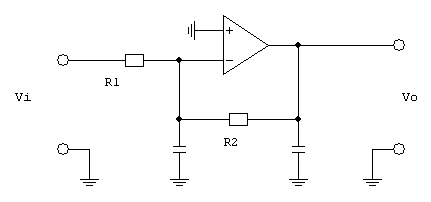
Ho giŕ riportato le due
capacitŕ parassite dovute agli switch analogici. Questo schema č spesso
utilizzato come esempio dei problemi "tipici" di cui puň soffrire un
amplificatore operazionale. :-)
Potete trovare molte informazioni sulla compensazione di questo tipo di circuito
in due interessanti documenti della National: AN-4
Monolitic Op Amp - The Universal Linear Component e AN-453
LH0024 and LH0032 High Speed Op Amp Applications. Senza scendere
troppo nei dettagli dico soltanto che le due capacitŕ riducono il margine di
fase del circuito alle alte frequenze, soprattutto per guadagni modesti (R2
piccola). Il circuito si avvicina molto all'instabilitŕ, come si puň vedere
simulandolo con PSPICE: nel caso dell'operazionale che ho usato, l'AD8057, c'č
un picco di risonanza (e quindi un aumento inaccettabile del guadagno) attorno
ai 10 MHz.
Per ovviare a questo problema č sufficiente inserire un condensatore in
parallelo a R2, introducendo uno zero nell'anello di retroazione e
compensando cosě il polo introdotto dall'operazionale e dalle capacitŕ
parassite. Questa per noi č una soluzione ideale, perché di immediata
applicazione; sarŕ sufficiente inserire un condensatore in parallelo a ogni
resistenza dello stadio di commutazione del guadagno, con valore calcolato
opportunamente in base alla resistenza.
Non so quanto vi
interessasse tutto ciň, ma per me (che sono relativamente nuovo al fantastico
mondo delle alte frequenze e delle capacitŕ parassite) č stato interessante
scoprirlo. Se qualcuno ha voglia di formalizzare queste considerazioni e
mostrare analiticamente la loro validitŕ, č il benvenuto: non č assolutamente
complicato, basta un modello di operazionale reale per piccoli segnali e qualche
formula. Io per ora passo la mano. ;-)
Dopo lo stadio
amplificatore/attenuatore c'č infine uno stadio sottrattore, che serve per
ripristinare la polaritŕ originaria del segnale (che era stata invertita dallo
stadio precedente) e per aggiungere l'offset di 2.5 V necessario per l'ingresso
dell'ADC.
Per l'implementazione di
questi stadi ho utilizzato l'AD8057 dell'Analog Devices, un operazionale
voltage-feedback ad alta velocitŕ e basso costo. Prendendo per buone le
simulazioni PSPICE che ho fatto sembra che il dispositivo si difenda piuttosto
bene fino a guadagni dell'ordine di dieci volte; dopodiché l'offset di tensione
in ingresso non trascurabile e il prodotto GBW non eccessivo iniziano a incidere
in modo rilevante sulle performance. Nella prossima sezione comunque riporterň
qualche grafico per dare un'idea piů precisa dell'entitŕ di questi problemi.
3. Stadio di
commutazione del guadagno. Questo stadio č il piů semplice, contiene
soltanto lo switch per la selezione AC/DC (pilotato da CTLOUT3) e la rete che
imposta la resistenza di retroazione dello stadio del guadagno descritto in
precedenza. La resistenza voluta č selezionata da un decoder, pilotato a sua
volta dai segnali CTLOUT0...2.
Vi sprono a esaminare gli
schemi e a considerarli con occhio critico.
Qualche grafico delle
prestazioni
Utilizzando il modello
PSPICE dell'AD8057, fornito direttamente da Analog Devices, ho fatto qualche
simulazione AC per verificare le prestazioni dello stadio di ingresso nel range
di frequenze che ci interessa (0...30 MHz). Le
analisi di
PSPICE vanno sempre prese col beneficio del dubbio; ci sono almeno un milione di
motivi per i quali la simulazione potrebbe discostarsi in modo considerevole
dalla realtŕ, non ultimo quello che i modelli forniti dai costruttori
descrivono soltanto le caratteristiche piů "importanti" dei dispositivi: spesso
sono utili per analisi molto specifiche, ma falliscono per analisi piů
complesse. In ogni caso i risultati sembrano piuttosto sensati e confermano
tutte le considerazioni fatte in precedenza.
Questa ad esempio č
l'analisi AC nel caso che lo stadio di ingresso sia impostato a guadagno
unitario:
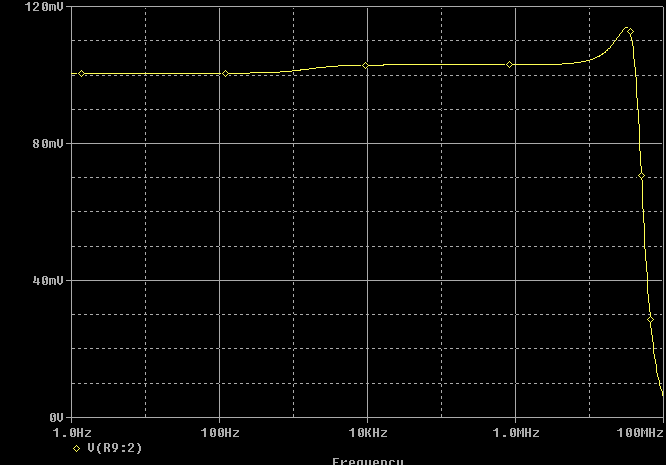
Si puň vedere il picco
di risonanza di cui ho parlato in precedenza. In questo caso non č nemmeno
cosě malvagio (permette di guadagnare qualcosina come banda passante) ma per
guadagni inferiori a uno diventa inaccettabile. Si noti anche il piccolo flesso
dalle parti di 1 kHz: esso č causato dalla non perfetta compensazione della
sonda in ingresso (ho utilizzato volutamente un valore leggermente sbagliato per
evidenziare il fenomeno e per enfatizzare l'importanza di questa taratura).
Questa č la stessa
analisi dopo che č stata inserita una capacitŕ in parallelo alla resistenza di
retroazione:

Il risultato ora č
soddisfacente. A 30 MHz il guadagno č ancora perfettamente unitario.
Questo invece č
l'estremo opposto, guadagno di trentadue volte:
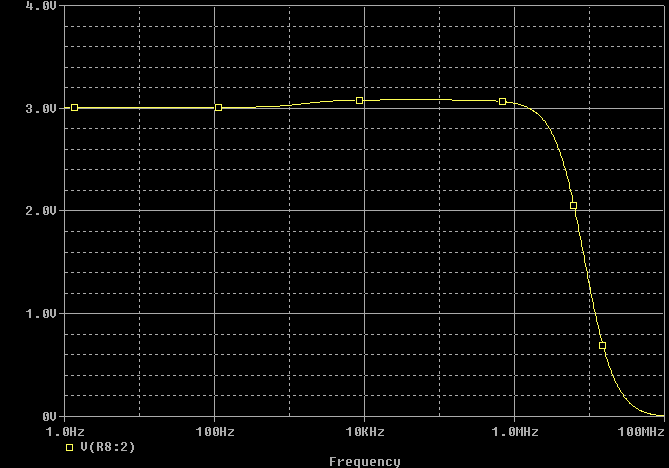
Come si vede le
prestazioni sono peggiorate notevolmente. La banda č piatta fino a 2-3 MHz, poi
comincia il rovinoso crollo. A 30 MHz abbiamo ormai raggiunto un'attenuazione di
24 dB. Ho provato a fare qualche esperimento per migliorare la situazione (ad
esempio mettendo due amplificatori in cascata ognuno con un guadagno piů
basso), ma sono stati solamente palliativi. La realtŕ dei fatti č che il
dispositivo ha i suoi limiti, ci dobbiamo accontentare oppure spendere piů
soldi per un modello con prestazioni superiori. A titolo di esempio, usando lo
sfarzoso CLC425 della National (8.37 € da RS) abbiamo una risposta pressoché
piatta fino a un guadagno di 16 volte, e un'attenuazione di 4-5 dB per un
guadagno di 32 volte. Come sempre, tutto dipende da quanto si vuole spendere.
;-)
Indice
(precedente) Il firmware della CPLD
(prossimo) La
scheda madre
|